Clase 4 - Planos en R³
Objetivos de la Clase
- Conocer la ecuación general de un plano en R³ y la generalización a Rⁿ
- Comprender la posición relativa de planos en el espacio
- Definir recta, plano e hiperplano en Rⁿ
Contenidos
Planos
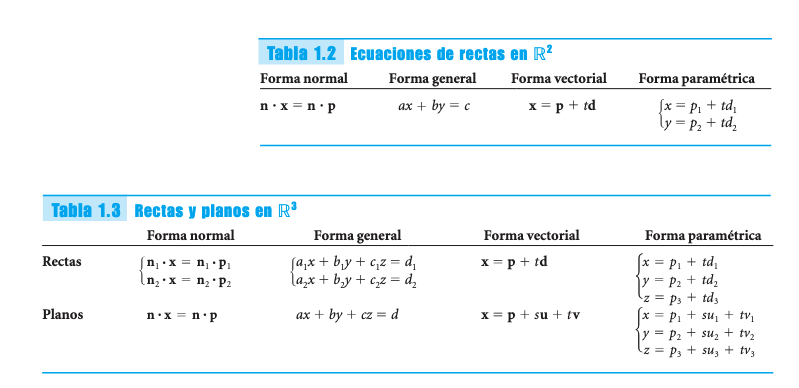
- Ecuación vectorial, paramétrica y cartesiana de un plano.
- Vector normal y vectores directores.
- Posición relativa entre planos.
- Distancia de un punto a un plano.
- Intersección de planos.
- Generalización a hiperplanos en Rⁿ.
1. Concepto de Plano
1.1 Definición Fundamental
Un plano en R³ está completamente determinado por dos elementos:
- Un punto conocido que pertenece al plano
- Un vector normal (perpendicular) al plano
Esto contrasta con una recta, que necesita un punto y un vector director (paralelo). La diferencia es que el plano se define por lo que es perpendicular a él, no por su dirección.
1.2 Intuición Geométrica
Imagine una hoja de papel infinita en el espacio. Para ubicarla completamente, necesita saber:
- Dónde pasa (un punto)
- Cómo está orientada (dirección perpendicular)
El vector normal es como una flecha que “atraviesa” el plano perpendicularmente, indicando su orientación en el espacio.
2. Ecuación Vectorial del Plano
2.1 Desarrollo de la Ecuación
Sea el vector normal al plano y un punto conocido en el plano. Para cualquier otro punto en el plano, el vector debe ser perpendicular a .
La condición de perpendicularidad se expresa como:
Ecuación Vectorial del Plano
Esta es la ecuación vectorial fundamental del plano.
2.2 Forma Equivalente
La ecuación también puede escribirse como:
o simplemente:
donde es una constante que depende del punto elegido y el vector normal.
3. Ecuación Cartesiana (General)
3.1 Forma Estándar
Si el vector normal es y usamos coordenadas , la ecuación vectorial se convierte en:
Ecuación General del Plano
donde y son las componentes del vector normal.
3.2 Interpretación de los Coeficientes
Para el plano :
- Vector normal:
- El plano es perpendicular a este vector
- Cualquier vector contenido en el plano satisface
4. Ecuación Paramétrica
4.1 Descripción Alternativa
Un plano también puede describirse usando dos vectores directores no paralelos y que están contenidos en el plano:
Ecuación Paramétrica del Plano
donde son parámetros y es un punto conocido en el plano.
4.2 Forma de Componentes
Expandiendo en coordenadas:
4.3 Relación con el Vector Normal
El vector normal se obtiene del producto vectorial de los vectores directores:
5. Ejemplos Básicos
Ejemplo 1 - Plano por Tres Puntos
Problema: Encontrar la ecuación del plano que pasa por , y .
Solución:
Encontrar dos vectores en el plano:
Calcular el vector normal:
Usar la ecuación vectorial con el punto
Ejemplo 2 - Interpretación Directa
Para el plano :
- Vector normal:
- Cualquier punto en el plano satisface esta ecuación
- El vector desde el origen hasta cualquier punto del plano tiene componente constante en la dirección normal
6. Distancia de un Punto a un Plano
6.1 Fórmula Fundamental
Fórmula de Distancia Punto-Plano
La distancia desde un punto al plano está dada por:
6.2 Justificación Geométrica
Esta fórmula surge de proyectar el vector desde cualquier punto del plano hasta sobre la dirección normal unitaria. El denominador normaliza el vector normal.
Ejemplo 3 - Cálculo de Distancia
Problema: Calcular la distancia del punto al plano
Solución:
El punto está en el plano.
7. Posición Relativa de Planos
7.1 Clasificación Fundamental
Dados dos planos con vectores normales y :
Tipos de Posición Relativa
Planos paralelos: Los vectores normales son proporcionales, para algún
- Si las ecuaciones también son proporcionales, los planos son coincidentes
- Si las ecuaciones no son proporcionales, son paralelos distintos
Planos secantes: Los vectores normales no son proporcionales
- Se intersectan en una recta
- El vector director de la recta es
7.2 Tres Planos en el Espacio
Las posibilidades son más ricas:
- Intersección en un punto: Caso general, sistema con solución única
- Intersección en una recta: Los tres planos se intersectan en la misma recta
- Sin intersección común: Configuraciones especiales (paralelos, etc.)
8. Intersección de Planos
8.1 Dos Planos No Paralelos
La intersección es siempre una recta. Para encontrarla:
- Resolver el sistema de ecuaciones de ambos planos
- Expresar las soluciones en términos de un parámetro libre
- La forma paramétrica resultante describe la recta
Ejemplo 4 - Intersección de Planos
Problema: Encontrar la intersección de y .
Solución:
- Restando las ecuaciones:
- Sustituyendo en la primera: , entonces
- Parametrizando con :
Recta resultante:
9. Generalización a Rⁿ
9.1 Hiperplanos
Definición - Hiperplano
en Rⁿ En , un hiperplano es un subespacio de dimensión definido por una ecuación lineal:
Ejemplos por dimensión:
- En : Un hiperplano es una recta (dimensión 1)
- En : Un hiperplano es un plano (dimensión 2)
- En : Un hiperplano tiene dimensión 3
9.2 Patrón Dimensional
Relación Dimensión-Ecuaciones
Para determinar un objeto k-dimensional en , se requieren ecuaciones linealmente independientes:
- Punto en : ecuaciones (dimensión 0)
- Recta en : ecuaciones (dimensión 1)
- Plano en : ecuaciones (dimensión 2)
9.3 Vector Normal en Dimensiones Superiores
En , el hiperplano tiene vector normal . Todos los conceptos de perpendicularidad y distancia se generalizan directamente.
10. Errores Comunes
Error 1: Confundir vector normal con vectores directores
- Incorrecto: Usar el vector normal como vector director del plano
- Correcto: El vector normal es perpendicular al plano, los vectores directores están contenidos en él
Error 2: Olvidar normalizar en la fórmula de distancia
- Incorrecto:
- Correcto:
Error 3: Confundir paralelismo con coincidencia
- Incorrecto: Decir que y son el mismo plano
- Correcto: Son paralelos distintos (vectores normales proporcionales, pero constantes no)
Enlaces a Ejemplos
- Clase04-Ejemplo01 ✅ - Plano por tres puntos
- Clase04-Ejemplo02 🤔 - Intersección de dos planos
- Clase04-Ejemplo03 ❌ - Análisis de tres planos
- Clase04-Ejemplo04 - Distancia punto-plano
- Clase04-Ejemplo05 - Conversión entre formas de ecuación
Resumen Personal
Conceptos clave dominados:
- Ecuación vectorial como condición de perpendicularidad
- Tres formas equivalentes de describir un plano
- Relación entre dimensión y número de ecuaciones
Aspectos por reforzar:
- Visualización de intersecciones múltiples
- Casos especiales en posición relativa
- Interpretación geométrica en dimensiones superiores
Conexión importante: Los planos establecen el puente entre geometría vectorial y álgebra lineal, preparando conceptos fundamentales como sistemas de ecuaciones y espacios solución.
Autoevaluación
Checklist de Comprensión
- ¿Puedo escribir la ecuación de un plano dados tres puntos?
- ¿Entiendo la diferencia entre vector normal y vectores directores?
- ¿Sé determinar cuándo dos planos son paralelos vs secantes?
- ¿Puedo calcular la distancia de un punto a un plano?
- ¿Comprendo qué es un hiperplano y su generalización?
Referencias
- Poole, D. Álgebra lineal: Una introducción moderna. Sección 1.3, págs. 38-41 AlgebraLinealPoole.pdf
Tags: clase4 planos R3 ecuaciones vector-normal hiperplanos geometria-analitica algebra-lineal clase