📚 Introducción
Esta clase introduce uno de los conceptos fundamentales del álgebra lineal: los sistemas de ecuaciones lineales. Comenzaremos con una perspectiva geométrica que nos permitirá visualizar estos sistemas como intersecciones de planos en el espacio, proporcionando intuición sobre el número y tipo de soluciones posibles.
Objetivos de la Clase
- Representar problemas geométricos de intersección de planos como motivación
- Comprender la interpretación geométrica de sistemas lineales
- Identificar los posibles números de soluciones de un sistema
- Establecer las bases conceptuales para el estudio sistemático de sistemas lineales
1. Motivación Geométrica: Intersección de Planos
1.1 El Problema Geométrico
Consideremos el problema de encontrar la intersección de dos planos en el espacio tridimensional . Este problema geométrico aparentemente simple nos llevará naturalmente al concepto de sistemas de ecuaciones lineales.
Problema Motivador
Dados dos planos en :
- Plano 1:
- Plano 2:
¿Cuál es su intersección?
1.2 Interpretación Geométrica
La intersección de dos planos puede resultar en tres casos fundamentales:
Casos de Intersección de Dos Planos
Caso 1: Los planos se intersectan en una línea recta
- Los planos no son paralelos
- Existe una infinidad de puntos de intersección
Caso 2: Los planos son paralelos y distintos
- No hay intersección
- No existen puntos comunes
Caso 3: Los planos son coincidentes
- Todos los puntos del plano son comunes
- Infinitas soluciones
2. De la Geometría al Álgebra
2.1 Traducción del Problema
El problema geométrico de encontrar la intersección se traduce algebraicamente en resolver el sistema:
Conexión Clave
Cada punto que satisface ambas ecuaciones simultáneamente representa un punto en la intersección de los dos planos.
2.2 Ejemplo Resuelto
Ejemplo 1 - Intersección de Dos Planos
Problema: Encuentre la intersección de los planos:
Solución:
Sumando las ecuaciones:
Sustituyendo en la primera ecuación:
Resultado: La intersección es la línea parametrizada por:
3. Extensión a Tres Planos
3.1 Casos Posibles
Cuando consideramos la intersección de tres planos, la variedad de casos aumenta considerablemente:
Casos de Intersección de Tres Planos
1. Un punto único: Los tres planos se intersectan en exactamente un punto
2. Una línea: Los tres planos se intersectan a lo largo de una línea común
3. Un plano: Los tres planos son el mismo (coincidentes)
4. Sin intersección: No existe punto común a los tres planos
5. Casos degenerados: Combinaciones de paralelismo y coincidencia
3.2 Ejemplo con Tres Planos
Ejemplo 2 - Sistema de Tres Ecuaciones
Problema: Analice geométricamente el sistema:
Análisis: Este sistema representa la intersección de tres planos. La solución, si existe y es única, será un punto en .
4. Generalización y Conceptos Fundamentales
4.1 Sistemas Lineales Generales
Observación Clave
Un sistema de ecuaciones lineales puede interpretarse geométricamente como la intersección de:
- Rectas en
- Planos en
- Hiperplanos en (para )
4.2 Tipos de Soluciones
Basándose en la interpretación geométrica, todo sistema de ecuaciones lineales puede tener:
Teorema - Tipos de Soluciones
Un sistema de ecuaciones lineales tiene exactamente una de las siguientes posibilidades:
1. Solución única: Las entidades geométricas se intersectan en un punto
2. Infinitas soluciones: Las entidades geométricas se intersectan en una línea, plano, etc.
3. Sin solución: Las entidades geométricas no tienen intersección común
4.3 Terminología
Definiciones Fundamentales
Sistema consistente: Tiene al menos una solución
- Puede tener solución única o infinitas soluciones
Sistema inconsistente: No tiene solución
- Las entidades geométricas no se intersectan
5. Ejemplos en
5.1 Intersección de Rectas
En el plano, un sistema de dos ecuaciones lineales representa la intersección de dos rectas:
Ejemplo 3 - Casos en
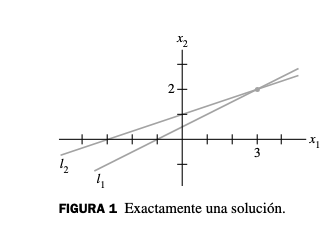
\mathbb{R}^2Caso A: Rectas que se intersectan
Solución: - punto único de intersección
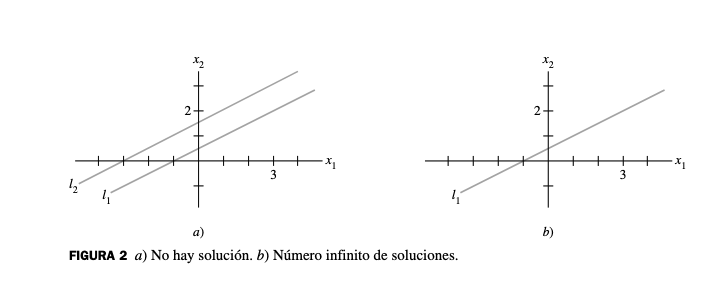
Caso B: Rectas paralelas (Pendiente igual, no sobrepuestas)
Resultado: Sin solución (inconsistente)
Caso C: Rectas coincidentes
Resultado: Infinitas soluciones
5.2 Visualización Gráfica
6. Aplicaciones y Motivación
6.1 Problemas de la Vida Real
Aplicaciones Prácticas
Los sistemas de ecuaciones lineales aparecen en:
- Ingeniería: Análisis de circuitos eléctricos
- Economía: Modelos de equilibrio de mercado
- Física: Problemas de equilibrio de fuerzas
- Computación: Procesamiento de imágenes y señales
- Optimización: Programación lineal
🚨 Conceptos Clave para Recordar
Ideas Centrales
Interpretación geométrica: Los sistemas lineales representan intersecciones de entidades geométricas
Tres casos únicos: Todo sistema tiene exactamente una solución, infinitas soluciones, o ninguna solución
Consistencia: Un sistema es consistente si tiene solución, inconsistente si no la tiene
Dimensión: En , trabajamos con intersecciones de hiperplanos de dimensión
📝 Ejercicios y Problemas
Ejercicios Básicos
Ejercicios de Práctica
Análisis geométrico: Para cada sistema, determine geométricamente el tipo de solución:
a)
b)
c)
Interpretación espacial: Describa geométricamente qué representa cada sistema en :
a)
b)
Problemas de Aplicación
Problemas Avanzados
Problema de equilibrio: Tres fuerzas actúan sobre un objeto en equilibrio. Si las componentes x de las fuerzas son 2, -1, y 3, y las componentes y son 1, 2, y -2, formule el sistema de ecuaciones que describe el equilibrio.
Análisis paramétrico: Para qué valores de el siguiente sistema tiene:
- Solución única
- Infinitas soluciones
- Sin solución
🎯 Preparación para la Próxima Clase
Lo que Viene
En la Clase 06, formalizaremos estas ideas geométricas mediante:
- Definiciones precisas de sistemas lineales
- Conceptos de solución y conjunto solución
- Sistemas equivalentes
- Notación estándar y terminología algebraica
🏷️ Tags
algebra-lineal sistemas-ecuaciones-lineales interpretacion-geometrica interseccion-planos consistencia inconsistencia clase-05 motivacion-geometrica
📚 Referencias
Lectura Principal
- Lay, D. Álgebra Lineal y sus Aplicaciones. Sección 1.1, págs. 3-7
- Poole, D. Álgebra lineal: Una introducción moderna. Sección 2.1, págs. 68-75